

























What will become the core sensor of future automatic driving?
richmor
richmor.net
2018-05-17 11:30:39
Autopilot has become a hot area for the application of artificial intelligence technology. However, as the pace of unmanned vehicles is greater, the greater the security challenges faced. The recent incidents of self-driving vehicles that continue to occur have once again pushed the issue of automatic driving safety to the forefront. The problem of safety of self-driving vehicles has become one of the most concerned topics in the current society, including the research field. Among them, as the eye of a self-driving vehicle, the sensor is very important.
Today, there are many types of on-board sensors, whether it is cameras, radars, or Lidar components that use optical pulse ranging. Among them, the car camera and the laser radar are the most noticeable.
Lidar is too expensive
From the point of view of bionics, human beings rely only on the eyes and ears to be able to accurately determine the various problems that arise in traffic. In the actual commercialization process, although Lidar works well, it is too expensive to be used in automobiles.
It is understood that the United States Velodyne64 line laser radar is about 100,000 US dollars, even the price of 16-line radar is also around 8000 US dollars.
Today, there are many types of on-board sensors, whether it is cameras, radars, or Lidar components that use optical pulse ranging. Among them, the car camera and the laser radar are the most noticeable.
Lidar is too expensive
From the point of view of bionics, human beings rely only on the eyes and ears to be able to accurately determine the various problems that arise in traffic. In the actual commercialization process, although Lidar works well, it is too expensive to be used in automobiles.
It is understood that the United States Velodyne64 line laser radar is about 100,000 US dollars, even the price of 16-line radar is also around 8000 US dollars.
Laser radar technology is not used to the extreme
Now many manufacturers place too much emphasis on the "trendy" nature of laser radar, and they do not really think of ways to maximize the performance of cheap sensors. This is a waste in the wake of the trend.
Its industry community has continued to explore the extremes of camera technology.
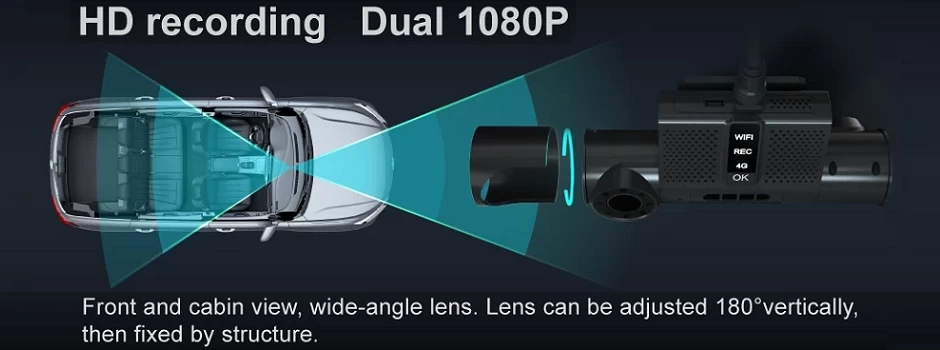
For a long period of time, most of the road conditions for autonomous driving are based on the monocular camera. However, it is inevitable that there will be an unbalanced problem in range and distance.
Because the technical principle of the camera is similar to human eyes, the wider the vision, the shorter the length of the detected precise distance. When the distance becomes longer, the angle of view becomes correspondingly narrower, which largely hinders the judgment of the road conditions.
How to solve? The binocular or even multi-view camera soon appeared in the industry.
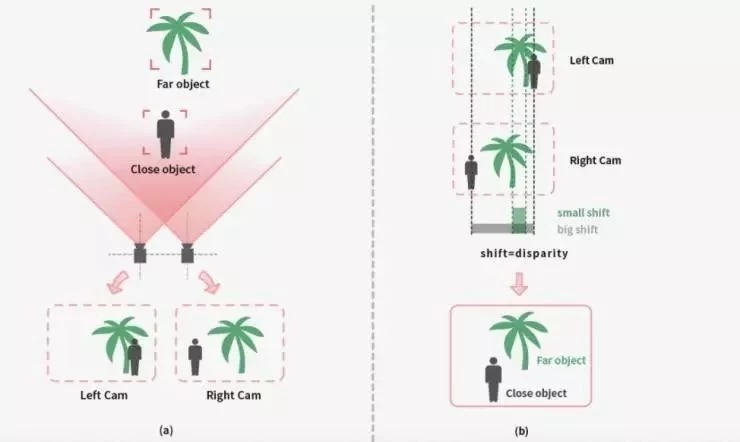
The principle of binocular vision ranging involved in binocular cameras is different from that of monocular. It is necessary to establish the correspondence between target obstacles and database samples before the distance estimation can be performed.
The principle of triangulation based on parallax is adopted, and the real three-dimensional geometric information of each point in the visual scene can be restored in real time by only calculating the positional deviation between the corresponding points of the two images obtained by the left and right “two eyes”. The feeling of 3D movies.
Its industry community has continued to explore the extremes of camera technology.
For a long period of time, most of the road conditions for autonomous driving are based on the monocular camera. However, it is inevitable that there will be an unbalanced problem in range and distance.
Because the technical principle of the camera is similar to human eyes, the wider the vision, the shorter the length of the detected precise distance. When the distance becomes longer, the angle of view becomes correspondingly narrower, which largely hinders the judgment of the road conditions.
How to solve? The binocular or even multi-view camera soon appeared in the industry.
The principle of binocular vision ranging involved in binocular cameras is different from that of monocular. It is necessary to establish the correspondence between target obstacles and database samples before the distance estimation can be performed.
The principle of triangulation based on parallax is adopted, and the real three-dimensional geometric information of each point in the visual scene can be restored in real time by only calculating the positional deviation between the corresponding points of the two images obtained by the left and right “two eyes”. The feeling of 3D movies.
In addition to binocular cameras, more advanced multi-camera cameras can capture scenes of different scopes through cameras with different angles, and at the same time solve the problem of being unable to switch back and forth between focal lengths and different recognitions at different distances.
However, based on reality, although the multi-camera solves some problems, it also brings new challenges such as cost and installation location. Of course, we believe that the camera technology will continue to improve.
However, based on reality, although the multi-camera solves some problems, it also brings new challenges such as cost and installation location. Of course, we believe that the camera technology will continue to improve.
Richmor is a Vehicle video recorder wholesales china.They has produced Mobile Car Dvr Recorder 1080p and vehicle surveillance system,etc.