



























什么会成为未来自动驾驶的核心传感器?
richmor
richmor.net
2018-05-17 11:30:39
自动驾驶仪已成为应用人工智能技术的热点地区。但是,随着无人驾驶车辆的步伐越大,面临的安全挑战就越大。最近发生的继续发生的自动驾驶车辆再次将自动驾驶安全问题推到了最前沿。自动驾驶车辆的安全性问题已成为当前社会最为关注的话题之一,包括研究领域。其中,作为自动驾驶车辆的眼睛,传感器非常重要。
今天,车载传感器有多种类型,无论是摄像头,雷达还是使用光学脉冲测距的激光雷达组件。其中,汽车摄像头和激光雷达最引人注目。
激光雷达太贵了
从仿生学的角度来看,人类只依靠眼睛和耳朵来准确地确定交通中出现的各种问题。在实际的商业化过程中,尽管Lidar运行良好,但用于汽车的成本太高。
据了解,美国Velodyne64在线激光雷达约为10万美元,即使16线雷达的价格也在8000美元左右。
今天,车载传感器有多种类型,无论是摄像头,雷达还是使用光学脉冲测距的激光雷达组件。其中,汽车摄像头和激光雷达最引人注目。
激光雷达太贵了
从仿生学的角度来看,人类只依靠眼睛和耳朵来准确地确定交通中出现的各种问题。在实际的商业化过程中,尽管Lidar运行良好,但用于汽车的成本太高。
据了解,美国Velodyne64在线激光雷达约为10万美元,即使16线雷达的价格也在8000美元左右。
激光雷达技术不被用于极端
现在许多制造商过分强调激光雷达的“新潮”特性,他们并没有真正想到最大限度地发挥廉价传感器性能的方法。这是趋势之后的浪费。
其行业界不断探索摄像头技术的极端。
长期以来,自动驾驶的大部分道路条件都是基于单眼相机。然而,在距离和距离上会有不平衡的问题是不可避免的。
由于相机的技术原理与人眼相似,视角越宽,检测到的精确距离的长度越短。当距离变长时,视角相应变窄,这在很大程度上妨碍了道路状况的判断。
怎么解决?行业内很快出现了双目甚至是多视点相机。
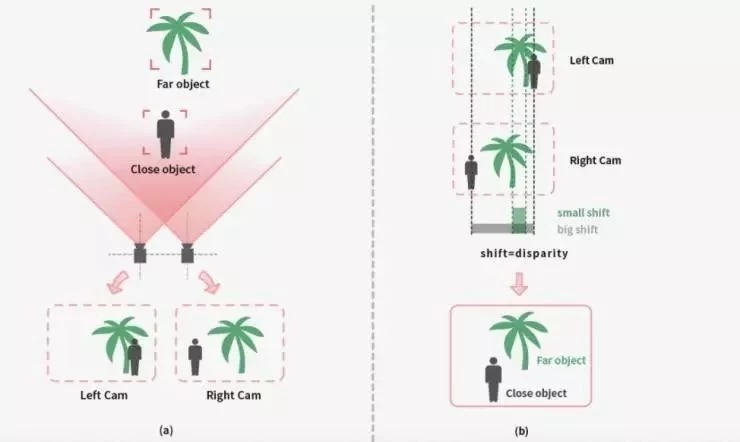
双眼相机所涉及的双目视觉测距原理与单眼相机的原理不同。在进行距离估计之前,有必要建立目标障碍物与数据库样本之间的对应关系。
采用基于视差的三角测量原理,仅通过计算左边获得的两幅图像的对应点之间的位置偏差,即可实时恢复视觉场景中各点的实际三维几何信息,正确的“双眼”。 3D电影的感觉。
其行业界不断探索摄像头技术的极端。
长期以来,自动驾驶的大部分道路条件都是基于单眼相机。然而,在距离和距离上会有不平衡的问题是不可避免的。
由于相机的技术原理与人眼相似,视角越宽,检测到的精确距离的长度越短。当距离变长时,视角相应变窄,这在很大程度上妨碍了道路状况的判断。
怎么解决?行业内很快出现了双目甚至是多视点相机。
双眼相机所涉及的双目视觉测距原理与单眼相机的原理不同。在进行距离估计之前,有必要建立目标障碍物与数据库样本之间的对应关系。
采用基于视差的三角测量原理,仅通过计算左边获得的两幅图像的对应点之间的位置偏差,即可实时恢复视觉场景中各点的实际三维几何信息,正确的“双眼”。 3D电影的感觉。
除双目相机之外,更先进的多相机相机可以通过不同角度的相机捕捉不同范围的场景,同时解决焦距不同和距离不同的识别之间无法来回切换的问题。
但是,基于现实,虽然多相机解决了一些问题,但也带来了成本和安装位置等新的挑战。当然,我们相信相机技术将会持续改进。
但是,基于现实,虽然多相机解决了一些问题,但也带来了成本和安装位置等新的挑战。当然,我们相信相机技术将会持续改进。
里士满是一个 车载录像机批发中国他们制作了 移动车录像机1080p 和 车辆监控系统,等等。