



























Co se stane základním senzorem budoucí automatické jízdy?
richmor
richmor.net
2018-05-17 11:30:39
Autopilota se stala horkou oblastí pro aplikaci technologie umělé inteligence. Vzhledem k tomu, že tempo bezpilotních vozidel je větší, čím větší jsou výzvy v oblasti bezpečnosti. Nedávné případy samohybných vozidel, které se nadále objevují, opět posunuly problém automatické jízdní bezpečnosti do popředí. Problém bezpečnosti vozidel s vlastním pohonem se stal jednou z nejzajímavějších témat současné společnosti, včetně oblasti výzkumu. Mezi nimi, jako oko samohybného vozidla, je senzor velmi důležitý.
Dnes existuje mnoho typů palubních senzorů, ať už se jedná o kamery, radary nebo komponenty Lidar, které využívají optický rozsah pulsů. Mezi nimi je nejvýraznější kamera pro automobily a laserový radar.
Lidar je příliš drahý
Z pohledu bioniky se lidské bytosti spoléhají pouze na oči a uši, aby dokázaly přesně určit různé problémy, které vznikají v dopravě. Při současném komercializačním procesu, ačkoli Lidar funguje dobře, je příliš nákladné, aby bylo možné ho používat v automobilech.
Rozumí se, že laserový radar Spojených států Velodyne64 je asi 100 000 amerických dolarů, dokonce i cena 16-řádkového radaru je také kolem 8000 amerických dolarů.
Dnes existuje mnoho typů palubních senzorů, ať už se jedná o kamery, radary nebo komponenty Lidar, které využívají optický rozsah pulsů. Mezi nimi je nejvýraznější kamera pro automobily a laserový radar.
Lidar je příliš drahý
Z pohledu bioniky se lidské bytosti spoléhají pouze na oči a uši, aby dokázaly přesně určit různé problémy, které vznikají v dopravě. Při současném komercializačním procesu, ačkoli Lidar funguje dobře, je příliš nákladné, aby bylo možné ho používat v automobilech.
Rozumí se, že laserový radar Spojených států Velodyne64 je asi 100 000 amerických dolarů, dokonce i cena 16-řádkového radaru je také kolem 8000 amerických dolarů.
Laserová radarová technologie se nepoužívá k extrému
Nyní mnozí výrobci kladou příliš velký důraz na "módní" povahu laserového radaru a nemají opravdu na mysli způsoby, jak maximalizovat výkon levných snímačů. To je odpad v důsledku tohoto trendu.
Jeho průmyslová komunita pokračovala ve zkoumání extrémů technologie kamery.
Po dlouhou dobu je většina silničních podmínek pro autonomní jízdu založena na monokulárním fotoaparátu. Je však nevyhnutelné, že v oblasti a vzdálenosti bude nevyvážený problém.
Vzhledem k tomu, že technický princip kamery je podobný lidským očím, čím širší vidění, tím kratší je délka zjištěné přesné vzdálenosti. Když se vzdálenost prodlužuje, úhel pohledu se odpovídajícím způsobem zmenší, což z velké části ztěžuje posouzení stavu vozovky.
Jak vyřešit? Binokulární nebo dokonce vícenásobná kamera se brzy objevila v průmyslu.
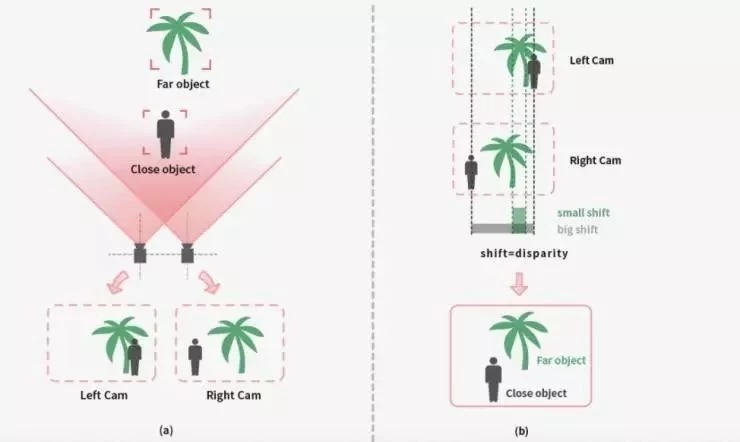
Princip binokulárního vidění v binokulárních kamerách se liší od principu monokulárního. Je třeba stanovit korespondenci mezi cílovými překážkami a vzorky databáze před provedením odhadu vzdálenosti.
Princip triangulace založený na paralaxu je přijat a skutečná trojrozměrná geometrická informace každého bodu ve vizuální scéně může být obnovena v reálném čase pouze výpočtem polohové odchylky mezi odpovídajícími body dvou obrazů získaných levým a pravé "dva oči". Pocit 3D filmů.
Jeho průmyslová komunita pokračovala ve zkoumání extrémů technologie kamery.
Po dlouhou dobu je většina silničních podmínek pro autonomní jízdu založena na monokulárním fotoaparátu. Je však nevyhnutelné, že v oblasti a vzdálenosti bude nevyvážený problém.
Vzhledem k tomu, že technický princip kamery je podobný lidským očím, čím širší vidění, tím kratší je délka zjištěné přesné vzdálenosti. Když se vzdálenost prodlužuje, úhel pohledu se odpovídajícím způsobem zmenší, což z velké části ztěžuje posouzení stavu vozovky.
Jak vyřešit? Binokulární nebo dokonce vícenásobná kamera se brzy objevila v průmyslu.
Princip binokulárního vidění v binokulárních kamerách se liší od principu monokulárního. Je třeba stanovit korespondenci mezi cílovými překážkami a vzorky databáze před provedením odhadu vzdálenosti.
Princip triangulace založený na paralaxu je přijat a skutečná trojrozměrná geometrická informace každého bodu ve vizuální scéně může být obnovena v reálném čase pouze výpočtem polohové odchylky mezi odpovídajícími body dvou obrazů získaných levým a pravé "dva oči". Pocit 3D filmů.
Vedle binokulárních fotoaparátů mohou pokročilejší kamery s více kamerami pořídit scény různých oborů kamerami s různými úhly a současně vyřešit problém, že nemohou přepínat mezi ohniskovou vzdáleností a různými rozpoznávkami na různých vzdálenostech.
Nicméně, na základě reality, ačkoli multi-kamera řeší některé problémy, přináší také nové výzvy, jako je cena a umístění instalace. Samozřejmě, věříme, že technologie fotoaparátu se bude i nadále zlepšovat.
Nicméně, na základě reality, ačkoli multi-kamera řeší některé problémy, přináší také nové výzvy, jako je cena a umístění instalace. Samozřejmě, věříme, že technologie fotoaparátu se bude i nadále zlepšovat.
Richmor je Videorekordér vozidel velkoobchodu s porcelánem. Vyrábějí Mobilní rekordér Dvr rekordéru 1080p a systém sledování vozidel,atd.