



























Gelecekte otomatik sürüşün ana sensörü ne olacak?
richmor
richmor.net
2018-05-17 11:30:39
Otopilot, yapay zeka teknolojisinin uygulanması için sıcak bir alan haline gelmiştir. Ancak, insansız araçların hızı arttıkça, güvenlik zorlukları ne kadar büyük olursa karşılaşılır. Halen devam eden kendi kendini süren araçlara ilişkin son olaylar, bir kez daha otomatik sürüş güvenliğini ön plana çıkardı. Kendi kendine sürüş araçlarının güvenliği sorunu, araştırma alanı da dahil olmak üzere mevcut toplumdaki en önemli konulardan biri haline gelmiştir. Bunlar arasında, kendinden tahrikli bir aracın gözü olarak, sensör çok önemlidir.
Günümüzde, optik nabız aralığı kullanan kamera, radar veya Lidar bileşenleri olsun, pek çok yerleşik sensör tipi vardır. Bunlar arasında, araba kamerası ve lazer radarı en dikkat çekicidir.
Lidar çok pahalı
Biyonik bakış açısından, insanlar trafikte ortaya çıkan çeşitli sorunları doğru bir şekilde belirleyebilmek için sadece gözlere ve kulaklara güvenirler. Gerçek ticarileşme sürecinde, Lidar iyi çalışıyor olsa da, otomobillerde kullanılması çok pahalı.
Amerika Birleşik Devletleri Velodyne64 hattı lazer radarının yaklaşık 100.000 ABD doları olduğu, hatta 16-line radarın fiyatı da 8000 ABD doları civarında olduğu anlaşılmaktadır.
Günümüzde, optik nabız aralığı kullanan kamera, radar veya Lidar bileşenleri olsun, pek çok yerleşik sensör tipi vardır. Bunlar arasında, araba kamerası ve lazer radarı en dikkat çekicidir.
Lidar çok pahalı
Biyonik bakış açısından, insanlar trafikte ortaya çıkan çeşitli sorunları doğru bir şekilde belirleyebilmek için sadece gözlere ve kulaklara güvenirler. Gerçek ticarileşme sürecinde, Lidar iyi çalışıyor olsa da, otomobillerde kullanılması çok pahalı.
Amerika Birleşik Devletleri Velodyne64 hattı lazer radarının yaklaşık 100.000 ABD doları olduğu, hatta 16-line radarın fiyatı da 8000 ABD doları civarında olduğu anlaşılmaktadır.
Lazer radar teknolojisi aşırı derecede kullanılmıyor
Şimdi birçok üretici lazer radarının "modaya uygun" yapısına çok fazla önem veriyor ve gerçekten ucuz sensörlerin performansını en üst düzeye çıkarmanın yollarını düşünmüyorlar. Bu trendin peşinde bir israftır.
Endüstri topluluğu kamera teknolojisinin uç noktalarını keşfetmeye devam etti.
Uzun bir süre boyunca, otonom sürüş için yol koşullarının çoğu monoküler kameraya dayanmaktadır. Bununla birlikte, mesafe ve mesafede dengesiz bir problemin olması kaçınılmazdır.
Kameranın teknik prensibi, insan gözlerine benzediğinden, vizyon ne kadar geniş olursa, tespit edilen kesin mesafenin uzunluğu o kadar kısalır. Mesafe uzadığında, görüş açısı, yol koşullarının kararını büyük oranda engelleyen, daha dar bir hal alır.
Nasıl çözülür? Binoküler veya hatta çok bakışlı kamera yakında sektörde ortaya çıktı.
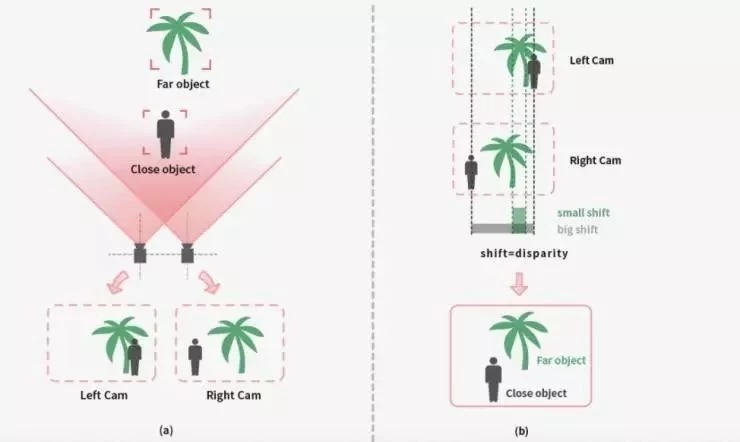
Binoküler kameralarda yer alan binoküler görme prensibi, monokülerden farklıdır. Mesafe tahmininin gerçekleştirilmesinden önce hedef engeller ve veritabanı örnekleri arasındaki yazışmayı kurmak gereklidir.
Paralaksa dayalı üçgenleme ilkesi benimsenir ve görsel sahnedeki her bir noktanın gerçek üç boyutlu geometrik bilgisi, yalnızca sol tarafından elde edilen iki görüntünün karşılık gelen noktaları arasındaki konumsal sapmanın hesaplanmasıyla gerçek zamanda geri yüklenebilir ve sağ “iki göz”. 3D filmlerin hissi.
Endüstri topluluğu kamera teknolojisinin uç noktalarını keşfetmeye devam etti.
Uzun bir süre boyunca, otonom sürüş için yol koşullarının çoğu monoküler kameraya dayanmaktadır. Bununla birlikte, mesafe ve mesafede dengesiz bir problemin olması kaçınılmazdır.
Kameranın teknik prensibi, insan gözlerine benzediğinden, vizyon ne kadar geniş olursa, tespit edilen kesin mesafenin uzunluğu o kadar kısalır. Mesafe uzadığında, görüş açısı, yol koşullarının kararını büyük oranda engelleyen, daha dar bir hal alır.
Nasıl çözülür? Binoküler veya hatta çok bakışlı kamera yakında sektörde ortaya çıktı.
Binoküler kameralarda yer alan binoküler görme prensibi, monokülerden farklıdır. Mesafe tahmininin gerçekleştirilmesinden önce hedef engeller ve veritabanı örnekleri arasındaki yazışmayı kurmak gereklidir.
Paralaksa dayalı üçgenleme ilkesi benimsenir ve görsel sahnedeki her bir noktanın gerçek üç boyutlu geometrik bilgisi, yalnızca sol tarafından elde edilen iki görüntünün karşılık gelen noktaları arasındaki konumsal sapmanın hesaplanmasıyla gerçek zamanda geri yüklenebilir ve sağ “iki göz”. 3D filmlerin hissi.
Binoküler kameralara ek olarak, daha gelişmiş çoklu kameralı kameralar, farklı açılarda kameralarla farklı kapsamlardaki sahneleri yakalayabilir ve aynı zamanda odak uzaklıkları ve farklı mesafelerdeki farklı tanımlamalar arasında gidip gelememe sorununu çözebilir.
Ancak, gerçekliğe dayanarak, çoklu kamera bazı problemleri çözse de maliyet ve kurulum yeri gibi yeni zorluklar da getiriyor. Elbette, kamera teknolojisinin gelişmeye devam edeceğine inanıyoruz.
Ancak, gerçekliğe dayanarak, çoklu kamera bazı problemleri çözse de maliyet ve kurulum yeri gibi yeni zorluklar da getiriyor. Elbette, kamera teknolojisinin gelişmeye devam edeceğine inanıyoruz.
Richmor bir Araç video kaydedici çin toptan. Onlar üretti Mobil Araç Dvr Kaydedici 1080p ve araç gözetleme sistemi,vb.