



























Что станет основным датчиком будущего автоматического вождения?
Richmor
richmor.net
2018-05-17 11:30:39
Автопилот стал горячей областью для применения технологий искусственного интеллекта. Однако, поскольку темпы беспилотных транспортных средств больше, тем больше проблем безопасности. Недавние инциденты, связанные с самообслуживанием транспортных средств, которые продолжают возникать, еще раз подтолкнули вопрос о безопасности вождения на первый план. Проблема безопасности самоходных транспортных средств стала одной из наиболее актуальных тем в современном обществе, в том числе в области исследований. Среди них, как глаз самонаводящегося автомобиля, датчик очень важен.
Сегодня существует множество типов бортовых датчиков, будь то камеры, радары или компоненты Lidar, которые используют оптический импульсный диапазон. Среди них наиболее заметны автомобильная камера и лазерный радар.
Лидар слишком дорог
С точки зрения бионики люди полагаются только на глаза и уши, чтобы иметь возможность точно определять различные проблемы, возникающие в движении. В процессе коммерциализации, хотя Лидар работает хорошо, это слишком дорого для использования в автомобилях.
Понятно, что линейный лазерный радиолокатор Velodyne64 в США составляет около 100 000 долларов США, даже стоимость 16-линейного радара также составляет около 8000 долларов США.
Сегодня существует множество типов бортовых датчиков, будь то камеры, радары или компоненты Lidar, которые используют оптический импульсный диапазон. Среди них наиболее заметны автомобильная камера и лазерный радар.
Лидар слишком дорог
С точки зрения бионики люди полагаются только на глаза и уши, чтобы иметь возможность точно определять различные проблемы, возникающие в движении. В процессе коммерциализации, хотя Лидар работает хорошо, это слишком дорого для использования в автомобилях.
Понятно, что линейный лазерный радиолокатор Velodyne64 в США составляет около 100 000 долларов США, даже стоимость 16-линейного радара также составляет около 8000 долларов США.
Лазерная радиолокационная технология не используется до крайности
Сейчас многие производители уделяют слишком много внимания «модной» природе лазерного радара, и на самом деле они не думают о способах максимизации производительности дешевых датчиков. Это отходы после тренда.
Его отраслевое сообщество продолжает изучать экстремальные технологии камер.
В течение длительного периода времени большинство дорожных условий для автономного вождения основаны на монокулярной камере. Тем не менее, неизбежно будет дисбалансная проблема в диапазоне и расстоянии.
Поскольку технический принцип камеры подобен человеческим глазам, чем шире видение, тем короче длина обнаруженного точного расстояния. Когда расстояние становится больше, угол зрения становится более узким, что в значительной степени затрудняет оценку дорожных условий.
Как решить? В этой отрасли вскоре появилась бинокулярная или даже многозвенная камера.
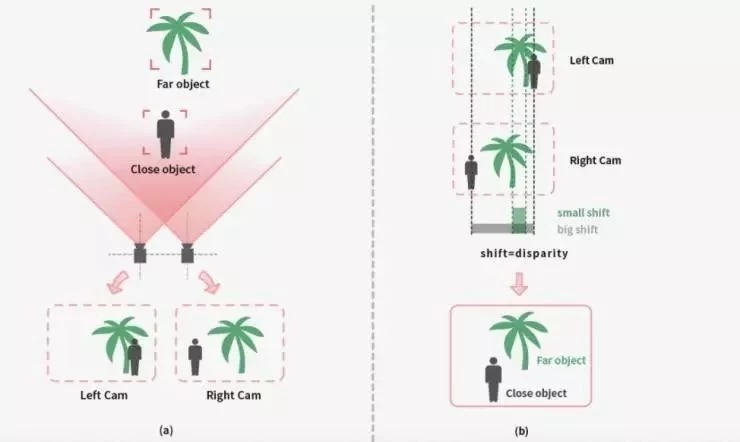
Принцип бинокулярного зрения, связанный с бинокулярными камерами, отличается от принципа монокулярности. Необходимо установить соответствие между целевыми препятствиями и образцами базы данных до того, как можно будет провести оценку расстояния.
Принят принцип триангуляции, основанный на параллаксе, и реальная трехмерная геометрическая информация каждой точки в визуальной сцене может быть восстановлена в реальном времени, только вычисляя отклонение положения между соответствующими точками двух изображений, полученными левым и правый «два глаза». Чувство 3D-фильмов.
Его отраслевое сообщество продолжает изучать экстремальные технологии камер.
В течение длительного периода времени большинство дорожных условий для автономного вождения основаны на монокулярной камере. Тем не менее, неизбежно будет дисбалансная проблема в диапазоне и расстоянии.
Поскольку технический принцип камеры подобен человеческим глазам, чем шире видение, тем короче длина обнаруженного точного расстояния. Когда расстояние становится больше, угол зрения становится более узким, что в значительной степени затрудняет оценку дорожных условий.
Как решить? В этой отрасли вскоре появилась бинокулярная или даже многозвенная камера.
Принцип бинокулярного зрения, связанный с бинокулярными камерами, отличается от принципа монокулярности. Необходимо установить соответствие между целевыми препятствиями и образцами базы данных до того, как можно будет провести оценку расстояния.
Принят принцип триангуляции, основанный на параллаксе, и реальная трехмерная геометрическая информация каждой точки в визуальной сцене может быть восстановлена в реальном времени, только вычисляя отклонение положения между соответствующими точками двух изображений, полученными левым и правый «два глаза». Чувство 3D-фильмов.
В дополнение к бинокулярным камерам более совершенные камеры с несколькими камерами могут захватывать сцены разных областей с помощью камер с различными углами и в то же время решают проблему невозможности переключения между фокусными расстояниями и различными распознаваниями на разных расстояниях.
Однако, основываясь на реальности, хотя мультикамера решает некоторые проблемы, это также создает новые проблемы, такие как стоимость и место установки. Конечно, мы считаем, что технология камеры будет продолжать улучшаться.
Однако, основываясь на реальности, хотя мультикамера решает некоторые проблемы, это также создает новые проблемы, такие как стоимость и место установки. Конечно, мы считаем, что технология камеры будет продолжать улучшаться.
Richmor - это Автомобильный видеорегистратор продает Китай. Они произвели Мобильный автомагнитофон Dvr Recorder 1080p а также система видеонаблюдения,и т.д.