



























O que se tornará o sensor central da direção automática futura?
Richmor
richmor.net
2018-05-17 11:30:39
Piloto automático tornou-se uma área quente para a aplicação da tecnologia de inteligência artificial. No entanto, como o ritmo dos veículos não tripulados é maior, maiores são os desafios de segurança enfrentados. Os recentes incidentes de veículos autônomos que continuam ocorrendo novamente impulsionaram a questão da segurança de direção automática para a linha de frente. O problema da segurança dos veículos autônomos tornou-se um dos tópicos mais preocupados na sociedade atual, inclusive no campo da pesquisa. Entre eles, como o olho de um veículo autônomo, o sensor é muito importante.
Hoje, existem muitos tipos de sensores on-board, sejam câmeras, radares ou componentes Lidar que usam pulso óptico. Entre eles, a câmera do carro e o radar a laser são os mais notáveis.
Lidar é muito caro
Do ponto de vista da biônica, os seres humanos confiam apenas nos olhos e ouvidos para determinar com precisão os vários problemas que surgem no trânsito. No atual processo de comercialização, embora o Lidar funcione bem, é caro demais para ser usado em automóveis.
Entende-se que os Estados Unidos Velodyne64 radar de linha de laser é de cerca de 100.000 dólares dos EUA, até o preço do radar de 16 linhas é também em torno de 8000 dólares dos EUA.
Hoje, existem muitos tipos de sensores on-board, sejam câmeras, radares ou componentes Lidar que usam pulso óptico. Entre eles, a câmera do carro e o radar a laser são os mais notáveis.
Lidar é muito caro
Do ponto de vista da biônica, os seres humanos confiam apenas nos olhos e ouvidos para determinar com precisão os vários problemas que surgem no trânsito. No atual processo de comercialização, embora o Lidar funcione bem, é caro demais para ser usado em automóveis.
Entende-se que os Estados Unidos Velodyne64 radar de linha de laser é de cerca de 100.000 dólares dos EUA, até o preço do radar de 16 linhas é também em torno de 8000 dólares dos EUA.
A tecnologia de radar a laser não é usada ao extremo
Agora, muitos fabricantes dão muita ênfase à natureza "moderna" do radar a laser, e não pensam em maneiras de maximizar o desempenho de sensores baratos. Isso é um desperdício na esteira da tendência.
Sua comunidade industrial continuou a explorar os extremos da tecnologia de câmeras.
Por um longo período de tempo, a maioria das condições da estrada para a condução autônoma é baseada na câmera monocular. No entanto, é inevitável que haja um problema desequilibrado no alcance e na distância.
Como o princípio técnico da câmera é semelhante aos olhos humanos, quanto maior a visão, menor o comprimento da distância precisa detectada. Quando a distância se torna mais longa, o ângulo de visão torna-se correspondentemente mais estreito, o que em grande parte dificulta o julgamento das condições da estrada.
Como resolver? A câmera binocular ou até multi-view logo apareceu na indústria.
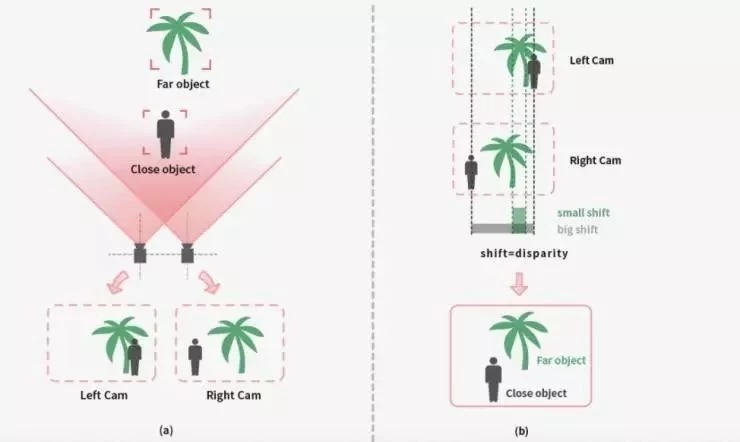
O princípio da visão binocular variando envolvido em câmeras binoculares é diferente do de monocular. É necessário estabelecer a correspondência entre os obstáculos do alvo e as amostras do banco de dados antes que a estimativa da distância possa ser realizada.
O princípio de triangulação baseado em paralaxe é adotado, e a informação geométrica tridimensional real de cada ponto na cena visual pode ser restaurada em tempo real, apenas calculando o desvio de posição entre os pontos correspondentes das duas imagens obtidas pela esquerda e pela esquerda. direito "dois olhos". A sensação de filmes em 3D.
Sua comunidade industrial continuou a explorar os extremos da tecnologia de câmeras.
Por um longo período de tempo, a maioria das condições da estrada para a condução autônoma é baseada na câmera monocular. No entanto, é inevitável que haja um problema desequilibrado no alcance e na distância.
Como o princípio técnico da câmera é semelhante aos olhos humanos, quanto maior a visão, menor o comprimento da distância precisa detectada. Quando a distância se torna mais longa, o ângulo de visão torna-se correspondentemente mais estreito, o que em grande parte dificulta o julgamento das condições da estrada.
Como resolver? A câmera binocular ou até multi-view logo apareceu na indústria.
O princípio da visão binocular variando envolvido em câmeras binoculares é diferente do de monocular. É necessário estabelecer a correspondência entre os obstáculos do alvo e as amostras do banco de dados antes que a estimativa da distância possa ser realizada.
O princípio de triangulação baseado em paralaxe é adotado, e a informação geométrica tridimensional real de cada ponto na cena visual pode ser restaurada em tempo real, apenas calculando o desvio de posição entre os pontos correspondentes das duas imagens obtidas pela esquerda e pela esquerda. direito "dois olhos". A sensação de filmes em 3D.
Além de câmeras binoculares, câmeras multi-câmeras mais avançadas podem capturar cenas de diferentes escopos através de câmeras com ângulos diferentes e ao mesmo tempo resolver o problema de não conseguir alternar entre distâncias focais e diferentes reconhecimentos em diferentes distâncias.
No entanto, com base na realidade, embora a multi-câmera resolva alguns problemas, ela também traz novos desafios, como custo e localização da instalação. Claro, acreditamos que a tecnologia da câmera continuará melhorando.
No entanto, com base na realidade, embora a multi-câmera resolva alguns problemas, ela também traz novos desafios, como custo e localização da instalação. Claro, acreditamos que a tecnologia da câmera continuará melhorando.
Richmor é um Gravador de vídeo do veículo por atacado chinaEles produziram Registrador móvel do dvr do carro 1080p e sistema de vigilância de veículos, etc